3. Montage des composants – Connexion des fils et cosses
Le branchement des boutons et manettes me paraissait être une formalité. Il n’y avait pas de difficultés particulières dans la logique de connexion : un fil « ground » à faire courir sur toutes les entrées « ground » des microswitchs, et un fil pour chacun des boutons et directions de manettes sur la carte Xinmotek XM-10. Et puis ensuite, pour l’éclairage des led, une phase rouge 12V, et un neutre noir, qui courent sur chacune des led. Les différents câbles fournis étant déjà sertis de cosses pour faciliter la connexion, donc simple à première vue. En réalité, la difficulté n’est pas là. Le vrai enjeu est de réussir à tout brancher correctement, tout en ayant le panel principal retourné, et être capable de le fermer ou ré-ouvrir sans arracher la moitié des branchements…Car il y aura au final un sacré plat de spaghettis électriques là-dedans.

J’ai donc décidé de placer la carte XM10 au centre de ce panel. Elle est vissée pour rester bien en place. De là, j’ai un point de vue plus clair sur la carte et les différents fils à connecter. Le câble USB reliant la carte XM-10 au raspberry pi est assez long, ce sera donc parfait pour ouvrir sans problème ce panneau supérieur et le retourner.
Sur l’illustration, vous voyez que les « ground » des deux joueurs sont déjà connectés. Quant aux différents fils unitaires par microswitch, ils pendent à ce stade chacun de leur côté. On y va en douceur, méthodiquement, sans se tromper. On fait attention, le panneau est à l’envers, on retourne son esprit pour identifier le bon bouton 🙂
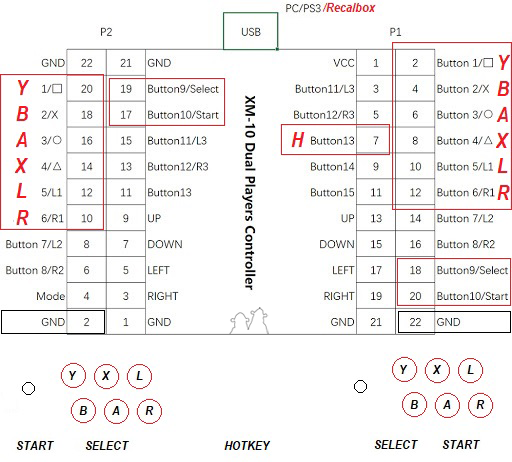
Le kit de Smallcab est livrée avec un petit schéma d’instruction de connexion. Ce qu’il faut savoir absolument, c’est que si vous choisissez de brancher le premier bouton de votre panel à la borne n°2 du P1 (Joueur 1) sur la carte, alors il vous faudra brancher le bouton correspondant du joueur 2 à la borne identique n°20 du P2. En effet, dans recalbox, il faudra simplement définir les boutons et la manette du premier joueur, pour que le deuxième joueur soit automatiquement paramétré. Si vous n’avez pas câblé le joueur 2 en respectant exactement la borne du joueur 1, alors ça ne marchera pas correctement.
A toute fin utile, ce schéma, je l’ai complété ci-après avec le code bouton présent dans recalbox (A, B, Y, X, L, R..). J’ai rajouté également leur position sur le panel. Le bouton H représentant la Hot Key. Il n’y en a qu’une seule, je dois la connecter au jour 1 (P1).
Smallcab fournit également un schéma de câblage des manettes, car il n’est pas simple de réperer les 4 microswitch correspondants aux différentes directions. Il faut penser à lire le schéma fourni comme une vue d’en dessous.
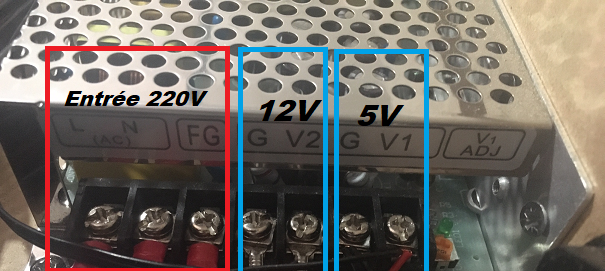
On continue ensuite avec les différents branchements électriques. Les câbles d’alimentation des LED des boutons sont connectés aux bornes 12V de l’alimentation. Le cordon livré initialement avec cette alimentation est coupé et dénudé pour être relié à la prise femelle d’alimentation du panneau arrière (Phase, neutre, et terre).

Les câbles USD et HDMI sont glissés jusqu’au côté gauche, où le raspberry pi prendra sa place. Le ventilateur est également installé et branché aux bornes 5V de l’alimentation. Un ventilateur de ce type dispose de trois fils. Le 3ième fil ne nous servira pas ici, il sert, pour les PC, à fournir des informations sur son statut. Il est disposé pour souffler l’air vers l’extérieur. L’air rentrera donc dans le panneau par les rainures d’aération présentes sur le dessous droit, et ressortira donc à gauche par le ventilateur. Il n’y a déjà plus beaucoup de place dans le panneau…
Le raspberry pi, pré-équipé de ses dissipateurs thermiques est installé juste derrière le ventilateur, et les différentes prises USB, HDMI et alimentation sont connectées. Pour l’alimentation, j’ai réutilisé le câble initialement fourni avec le kit raspberry pi acheté, en coupant la partie transformateur, afin de le brancher directement aux bornes 5V de l’alimentation principale (là où est déjà connecté le ventilateur). J’ai gardé volontairement l’interrupteur mécanique déjà présent sur le câble du raspberry. En effet, cela permet ensuite de tester l’allumage des LED tout en laissant le raspberry éteint le temps de ces tests. Le raspberry n’est pas fixé, il est juste bloqué avec une vis. L’objectif étant de pouvoir le soulever facilement pour retirer la carte SD si nécessaire.

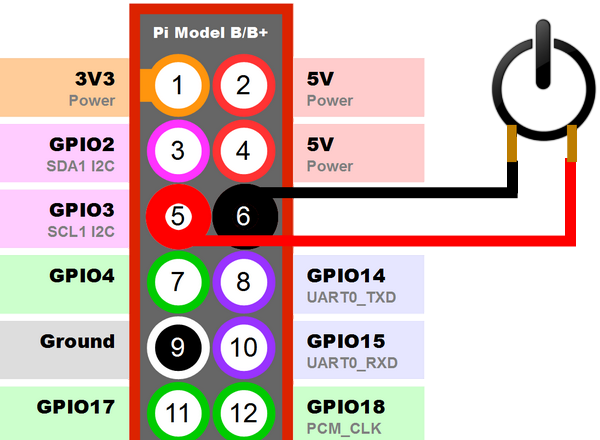
Enfin, je connecte les bornes GPIO 5 et 6 du raspberry au microswitch du bouton jaune de la face arrière, pour pouvoir gérer le « shutdown » propre ensuite avec recalbox. Nous verrons plus tard comment activer cette option dans la partie logicielle de recalbox.